- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
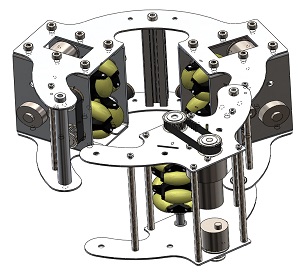
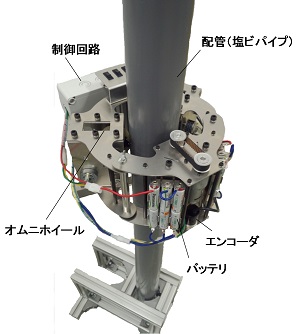
配管検査ロボットの開発(H25)
| 大学校及び設置科 | 中国職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | CAD/CAM応用実習、精密加工応用実習、自動化機器応用実習、製品設計応用実習、電子装置設計製作実習 |
| 課題に取り組む推奨段階 | 応用課程2年 |
| 課題によって養成する知識、技能・技術 | CAD/CAM技術、精密加工技術、機械設計技術、プリント基板作成技術、マイコンプログラミング技術 |
製作の目的と概要
★技能・技術習得目標:
開発を通して、複合した技能・技術及びその活用能力を習得します。具体的には、解析を主体とした製品設計技術や板金・切削加工技術,計測制御技術を複合的に活用した製品製造技術,製品設計製造情報のドキュメント作成および管理技術などの習得を目標としています。
成果
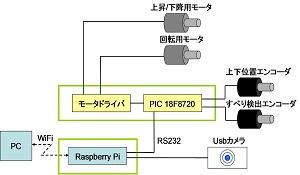
(2)ロボットの遠隔操作を確認し、動画像をパソコンでモニタすることができました。
(3)ロボットの移動に伴う、すべり検出アルゴリズムを確立することができました。
★アピールポイント:
岡山RTB研究会(岡山ロボットテクノロジービジネス)で提案された技術課題をもとに開発しました。ポリテックビジョンにおいては、岡山工業技術センター等からも高い評価を得ることができました。特に駆動機構にオムニホイールを利用しており、新しい駆動機構として注目されました。デモ走行では多くの入場者の皆様に興味をもってもらうことができました。