- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
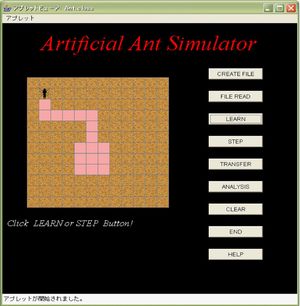
ニューラルネットワークによる人工アリロボットの制作(H18)
| 大学校及び設置科 | 中国職業能力開発大学校 附属島根職業能力開発短期大学校 情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | ソフトウェア制作実習、オブジェクト指向プログラミング実習、工場内ネットワーク実習、計測制御実習 |
| 課題に取り組む推奨段階 | 前提教科科目習得後 |
| 課題によって養成する知識、技能・技術 | 計測制御、データ通信、ニューラルネットワーク、データ処理・分析 |
製作の目的と概要
成果
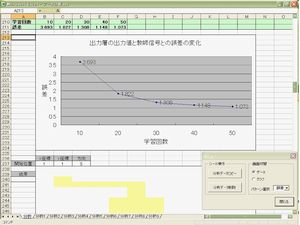
このアプリケーションでは、フェロモンの道と餌の領域が記述してある環境定義ファイルを読み込み、行動を決定するための学習パターンをもとに学習を繰り返します。ある程度学習した後、人工アリを動作させることにより餌にたどり着けるかどうかを確認します。このとき、学習回数に対する出力値と教師信号の誤差の変化をグラフ化し、その結果も検証します。また、学習データは赤外線でロボットに転送しています。