- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
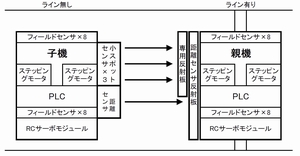
PLCによる同期運転搬送ロボットの制作(H22)
| 大学校及び設置科 | 北陸職業能力開発大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、機械加工、電気電子基礎、シーケンス制御、メカトロニクス工学、センサ工学、アクチュエータ工学 |
| 課題に取り組む推奨段階 | 機械加工実習、電気電子基礎、PLC実習 |
| 課題によって養成する知識、技能・技術 | PLC実務技術、メカトロニクス技術、機械加工技術などの実践力を身につけます。 |
製作の目的と概要
制御技術科ではメカニズムとコンピュータ制御の両面に柔軟に対応できる実践技術者の育成を目標としています。本課題はその両面を有しているので総合制作課題としました。
成果