- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
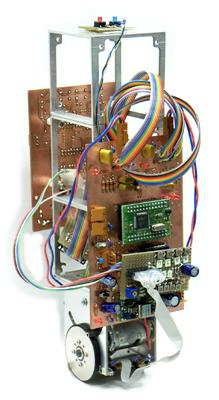
倒立振子型マイクロマウスの開発(H21)
| 大学校及び設置科 | 東北職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、機械工学概論、リアルタイムシステム、リアルタイムシステム構築実習 |
| 課題に取り組む推奨段階 | 生産システム技術系は専攻実技終了後、情報系は計測制御システム構築課題実習終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、リアルタイムシステム構築方法、計測制御方法、電子制御装置設計方法、生産機械設計製作方法が複合したヒューマンスキルを含めた開発スキルを身に付けます。 |
製作の目的と概要
サイズを半分にして八分の一の体積で作るのでは、単なる「高密度実装技術」の話になってしまうので、縦方向に伸ばして体積をかせぎ、高密度・高精度の加工・実装装置を使わなくても済むようにするとともに、あえて二輪による倒立振子型とし迷路探索機能に加えて倒立制御という技術的課題を織り込みました。ソフトウェア的には倒立振子型の姿勢制御技術と迷路探索技術、電子系的には学生の手はんだでも実現可能なレベルの密度の実装に加えて倒立制御により変化が大きく高頻度になった負荷変動に対応できるドライブ回路とセンサー周りを中心にしたノイズ対策技術、機械系的には高精度な加工・組立技術といった技術的内容を織り込んだテーマとして設定しました。
成果