- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
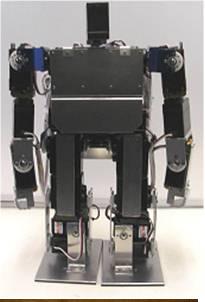
マイコン制御型二足歩行ロボットの製作(H19)
| 大学校及び設置科 | 関東職業能力開発大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、機械加工、CAD実習、数値制御加工実習、電気・電子工学実験 |
| 課題に取り組む推奨段階 | 機械加工実習、数値制御加工実習、マイコン制御実習およびメカトロニクス実習を終了後 |
| 課題によって養成する知識、技能・技術 | 課題の製作を通して、主にメカトロニクスに関する実践力を身に付けます。 |
製作の目的と概要
本課題は、加工技術や制御するためのプログラム制作知識など多くの要素を含み、設計・製作・評価の一連の流れを理解し、技術の向上を図ることができると考えて実践しました。
本ロボットは、マイコン、バッテリーなどを搭載し、マイコン制御による二足歩行を行うことを目標にしました。
成果
ロボットは、ゆっくりですが静歩行で二足歩行および四足歩行を行うことができました。この時の二足歩行速度は、約1.8×10−2[m/s] 、四足歩行速度は、約2.3×10−2[m/s]でした。
ロボット制御は、SH○TM7145マイコンボードを搭載して行いました。ロボットの二足歩行時と四足歩行時の姿勢は、ロボット胸部に搭載した加速度センサで計測しました。ロボット動作は、直立、二足歩行および四足歩行の3動作で、本体に搭載した入力スイッチで切り替えることができます。
また、赤外線送受信システムを製作し、ロボットに触れることなく遠隔操作で歩行動作を切り替えることが出来るようにしました。