非線形制御系の設計 -スライディングモード・サーボ系-実践報告◆2
- ポリテクカレッジ北海道(北海道職業能力開発短期大学校)成田 忠雄
1.はじめに
スライディングモード制御は,状態空間内に設定された切り換え軌道拘束超平面の両側で制御入力のゲインを切り換えることで,制御構造を変える制御法である。この切り換え線に沿って状態を原点に収束させることで,システムの安定化を図ることができる。この制御法は制御対象のパラメータ変動や外乱にも不感で,非線形にも強く,ロバスト性を備えた実用的な制御法として注目されている。
本報告は非線形特性を含む対象に,ロバスト性を失わずに目標値に追従するスライディングモード・サーボ系を提案する。具体的には,VSS制御は本質的には状態を原点に収束させるレギュレータであるので,これに内部モデル原理を満たす系を付加して良好な追従特性をうるサーボ系を実現し,VSS制御則の特徴を維持したロバスト・サーボ系を設計する。さらに過渡特性の改善を考慮して,前向き補償器を付加した拡大系を構成している。
2.入出力特性
制御対象を次の多入力多出力の非線形時変を含むn次システムとする。
(1)
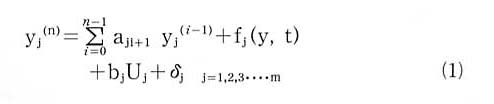
ただし,Uj,yjは入力および出力を表す。δjは外乱で|δj|の最大値は知られているとする。係数aj,i=1,2…,n,bjは変動したり,測定誤差を伴っているものとするが,値が存在する変動領域は既知であるとする。一般性を失うことなく,bj>0を仮定する。非線形項fj(yj,t)は多項式オーダで抑えられると仮定する。
つまり|fj(yj;t) |≦Fj(|yj|;t)を満足する多項式Fj(|yj|;t)が存在する。
Fj(|yj|;t)の係数は時間の正関数で常に滑らかに選ぶことができる。
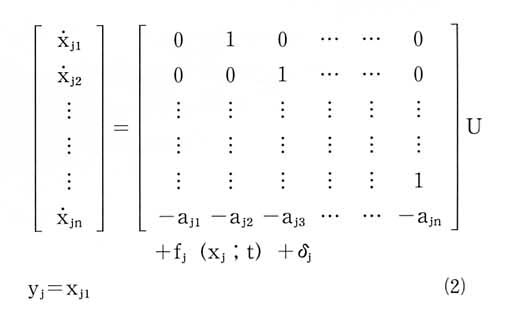
制御対象(1)式は次式で示される,状態空間法で定式化した可制御正準形の状態方程式と出力方程式で記述できるものとする。
(2)
3.拡大系の理論
図1のような結合系を考える。Lj(s),Gj(s)は補償器の伝達関数で厳密にプロパーである。
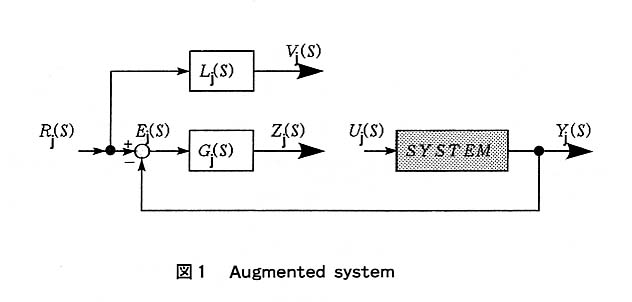
Rj(s),Vj(s),Zj(s),Ej(s)はスカラで,それぞれrj(t),vj(t),zj(t),ej(t)のラプラス変換である。またvj(t),zj(t)は補償器の状態の一部で出力ともなり,r(t)は目標値信号である。
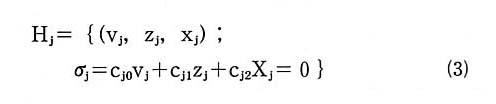
この結合系の変数が張るvj×zj×xj空間に次の超平面を定義する。
(3)
Cj0,Cj1はスカラ,Cj2=[Cj21Cj22…Cj2n]である。適当なスライディングモード制御によりσj=0が達成されると,
(4)

であるので,
(5)
が成立する。
ここで,cj1Gj(s)=pj(s)/dj(s)で表し,またqj(s)=cj2[1ss2……sn-1]Tを導入すると,目標値→出力間は伝達関数で次式となる。
(6)

さらに,目標値対追従誤差については,
(7)

で与えられる。
(6)式の分母を(8)式と置く。
Δj(s)=Pj(s)-qj(s)dj(s) (8)
Δj=0の根が複素数開左半面にあり,Rj(s)=1/dj(s)である目標値信号に対して,
(9)
が成立すれば制御対象の出力は定常偏差なく,この目標値信号に追従させることができる。
4.本拡大系の特徴
結局,制御対象の前段に内部モデルとして1/dj(s)を付加した内部モデルに基づく制御系が構成されたことになり,これまでをまとめると以下のことがわかる。
このスライディングモード・サーボ系は,
① 通常のスライデイングモード制御の特徴であるパラメータ変動,外乱に対するロバスト性を保存する。
② pj(s),qj(s)の適当な設定,つまりGj(s)の分子とcj2の適当な設定により(5)式の極を任意に設定できる。
③ ラプラス変換でRj(s)=1/dj(s)である目標値信号に対して出力yjを定常誤差なく追従させることができる。
④ 前向き経路の補償器Lj(s)により,(5)式の分子を多少変化させることができるので,過渡特性の改善が期待される。
5.特性方程式と安定化極配置
さらに拡大系の安定化を図るために,前節の条件のもとでpj(s),qj(s),dj(s)について次のように定義する。
( I ) dj(s)はRj(s)の型で決める。
(I I) p(s)はcj1Gj(s)=pj(s)dj(s)-1が厳密にプロパーであることにより,ゆえに{dj(s)の次数1-1}次の任意多項式であること。
(III) qj(S)に関してはqj(S)=ΣCj2nS1-1と定義したのでqj(s)はn-1次の多項式とする。
この拡大システムの特性方程式は結局(8)式であるので,希望とするシステムに設計可能か,つまり,Δj(S)の極が複素数開左半面に配置可能かどうかを検討すればよいこととなる。
拡大系の特性方程式Δjを示す関数の型は(10)式で与えられる。
pj(s)-qj(s)dj(s)=0 (10)
(8)式に対して希望する特性多項式を,
ζmsm+ζm-1sm-1+…+ζ2s+ζ1=0 (11)
とすると,dj(s)=s1とすれば,
(12)

1次以下の項に対してはpj(s)を次式のようにおけば,
(13)

(10)式と(1l)式は等価であることにより,次数mはm=n-1-1として得られる。
ゆえに(6)式の拡大系の特性根は,
qj(s)の係数cj2n~Cj21;cj1i=ζ1,
i=m-1…m
pj(s)の係数cj1~cj1;cji=ζ1,
i=1…1
により,安定かつ任意に極配置可能となる。
6.制御アルゴリズム
上記の入出力特性を実現するスライディング・モード制御アルゴリズムについて検討する。前向き補償器Lj(s),動的補償器Gj(s)をそれぞれ以下の状態方程式で表す。
ただし,vj,zjがそれぞれの状態方程式の状態変数の1つとなっているように作られている。
Lj(s)は[ojvj]Tを状態変数として,
(14)
Gj(s)は[wjzj]Tを状態変数として,
(15)
とする。
さて,σj(t)に関するリアプノフ関数の候補を,Hj(t)=2-1σj2とする。リアプノフでの意味での安定定理から関数の時間微分Hj(t)が負定関数となるような制御則を作ればよいので,実際にはσjσj<0となるように制御則を作ればよいので,計算すると以下となる。
(16)

(1),(14),(15)式を用いvj,zj,xjを上式から消去すると,
(17)
となる。ただしC=[100…0]
また,非線形項Fj(|yj|;t)はXjの多項式で表され,そのk番目の項は次の形で書ける。
(18)

ここで,αjk(t)はtの関数でv(i,p,j,k)はFjkにおけるXjpのべき乗を表す。
したがって,制御入力Ujとして,
(19)
とし,各係数をσjσj<0となるように切り換えればよい。実際には,
(20)
であるので,例えばvjσjの項について考えれば,
(21)
となるようにφjvを切り換える。
他の項も同様である。φjr,φjδはスカラであるがφjo,φjw,φjxはスカラではないので各要素ごとに切り換える必要がある。
同様に,ujk(xjk;t)は非線形項の補償項で,
式A

で表され,γjk(xjk;t)は切り換えゲインで,
(22)
となる。
7.疑すべり状態
ところで,この制御はサンプリング時点のみでフィードバックゲインの切り換え遅れによるチャタリングが発生することが指摘されている。ここではこれらに対して,切り換えゲインの連続化とする疑すべり状態を適用してチャタリングを避けている。入力を図3のように連続化するためにσj=0の近傍で正負の連続化係数εの領域Δσを与え,各切り換えゲインφjmを(20)式で与える。この方法で疑すべり状態とするとlimσj=0,
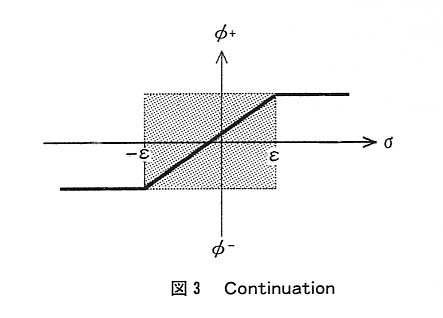
(23)

は補償されないが,状態を領域Δσjにとどめることが補償される。
8.例題設計
制御対象として動作が次式で示される2リンクのマニュピレータを考える。ただし長さ,質量がともに1に正規化されているものとする。
(24)
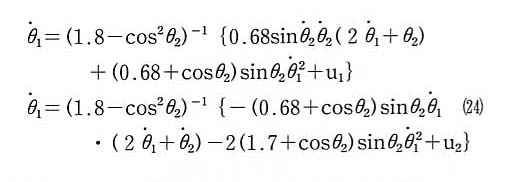
ただし,θ1,2を移動角,U1,2を入力電圧とする。
このシステムを以下の条件でランプ入力に対して定常誤差のない2型のサーボ系を構成するとする。(6)式において目標値Rj(s)は2次ゆえ,dj(s)=s2からqj(s)は1次,pj(s)は1次ゆえに,特性方程式Δj(s)を3次とすればよいこととなる。例えばΔj(s)=0の根を,
Δj(s)=(s+12)(s+15)(s+18) (25)
また,速応性を考慮した前向き補償器Lj(s)を,
Lj(s)=βj(s+50) (βjは未知の定数) (26)
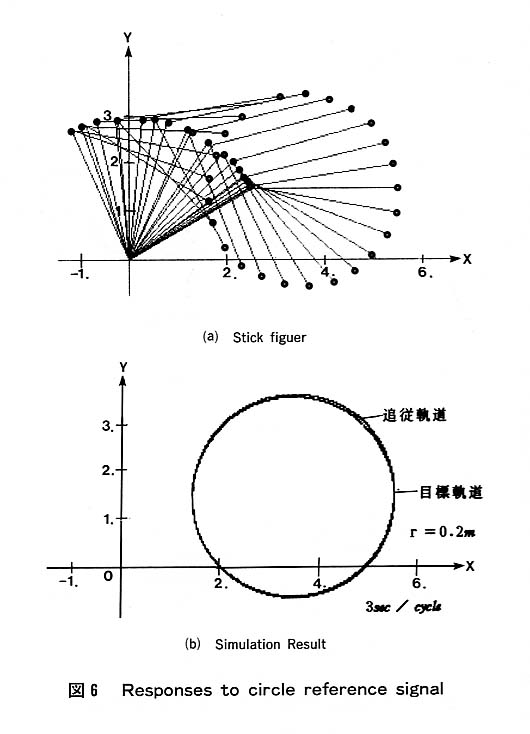
目標値信号Rj(s)を台形状の目標軌道とアーム先端が半径0.2mのランプ状目標円軌道に追従するサーボ系を構成してシミュレーションを行う。
前向き経路補償器,動的補償器の各係数をいくつか選んでシミュレーションを行った。
9.シミュレーションと考察
図5に示すように台形軌道で第1関節45°,第2関節60°のランプ目標値と動作1~2秒間は定置と以後原点へ戻る全3秒間の行程動作としている。前向き補償器の定数βjを-1000と選んだ。
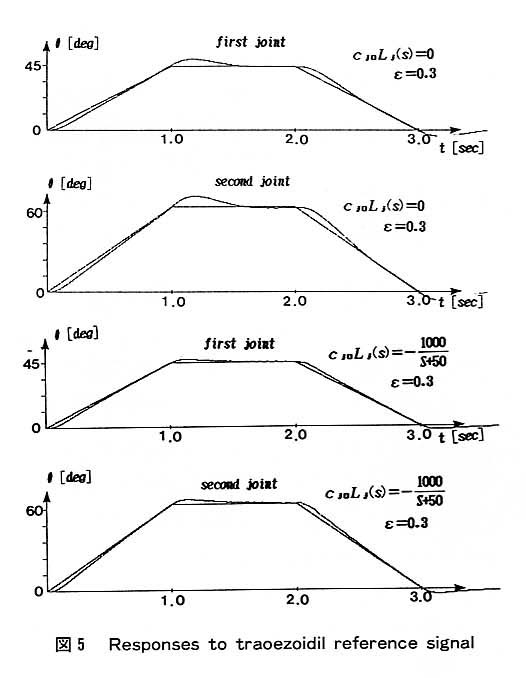
連続化係数εは0.3としたものを載せたが両者の値をいくつか変えて行ったが,βjの値は上記のものが最適値であった。連続化係数についてはサンプリング時間との兼ね合いも考慮しながら設定する必要があると判断した。
図5からわかるように明らかにL(s)の存在により追従誤差が低減している。図6は上方法と同一条件のもとで円軌道の追値制御で,(a)はアーム先端の円軌道目標値軌道と各アームのステック図である。(b)はシミュレーション結果である。目標軌道と追従値との誤差は最大で2㎜程度となっている。また多少チャタリングの発生がみられる。
10.おわりに
非線形制御系の設計法について提案した。世のさまざまなシステムを考えると,多くは非線形なシステムであるといわれている。制御技術的にいえば,非線形補償・ロバストな本制御則は実用化に向けて多くの研究,技術者の長い研究の歴史があることが判明した。今回,ロバスト性を維持するスライディングモード制御は注目に値する制御則の一つであることを,シミュレーションではあったが,その有効性を確信した。
今後は,理論と応用例がまとめられた参考書2)をもとに本制御則のROM化など,実システムに組み込む方向で取り組んでいきたいと考えている。
〈参考文献〉
- 1) 成田,疋田:連続的可変構造制御によるロバストサーボ系,日本機械学会論文集,54-503,1489(1988).
- 2) 野波,田:スライディングモード制御,コロナ社,1994.
- 3) 美多,陳:スライディングモード制御とロボットアームの軌道制御,システム/制御/情報,vol.34,No.1,pp50-55.1990.