メカトロニクスセミナー実践報告特集◆メカトロニクス教材について◆1◆
- ポリテクセンター宮崎(宮崎職業能力開発促進センター)下笠賢二・北山貴宏・江口智弘
1.はじめに
ポリテクセンター宮崎では相撲ロボットの製作を3年前から始めました。1年目は指導員自身が勉強をしながら,悪戦苦闘しながら製作に取り組みました。ある程度相撲ロボットのことが理解できたので,昨年から能力開発セミナー(以下「セミナー」という)として開講しました。しかし,昨年のセミナーは急きょ設定したことと,目標の1つである富士ソフト主催のロボット相撲大会九州予選の日程が前年より2ヵ月近く早くなったこととでうまく体系化して行うことができませんでした。
そこで今年は,体系化し,予選に間に合うよう設定しました。しかし,能力開発は施行錯誤の連続で,計画段階では完全な体系化を行ったとしても,結果的には十分な体系化は行えなかったと思います。そこで,今回は当センターで行ったセミナーについて問題点も含めて報告します。
2.目的
相撲ロボットの製作を卒業研究のテーマにしている短大は数多くあります。その理由としては,製作を行ううえでさまざまな知識を得られることや,考え方を身につけることができるようになるということがあげられます。その場合,対象者は学生ですが,セミナーの対象者はほとんどが在職者です。
そこで,
- ① 技術の習得
- ② 情報(ノウハウ)交換の場
- ③ 新人の基礎習得
- ④ その他
ということに重点を置いて進めていくことにしました。
3.相撲ロボット製作において必要な要素
相撲ロボットには次のような要素が含まれています。その構成要素を図1に示します。
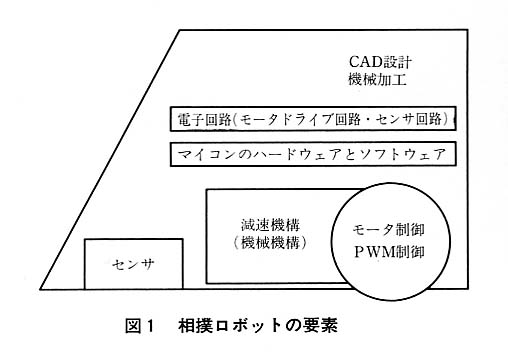
- ① 機械加工
- ② 機械機構
- ③ 電子回路
- ④ センサ
- ⑤ マイコンのハードウェア
- ⑥ ソフトウェア
- ⑦ その他
これらの要素をセミナーという形で体系化し,4ヵ月という期間で相撲ロボットを完成させる計画を立てました。その計画表を図2に示します。
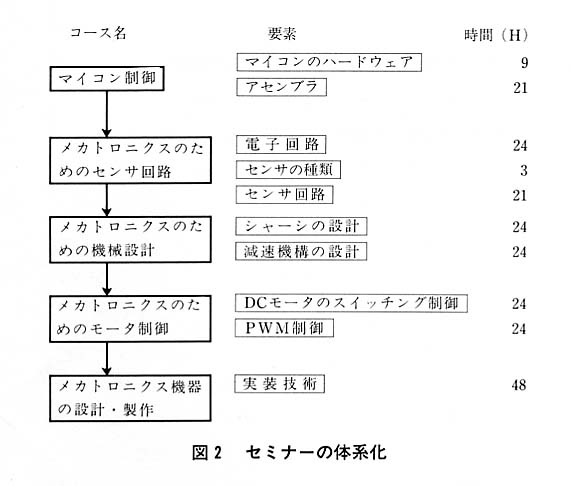
昨年は3ヵ月という短期間だったため,完成させることに重点を置いてしまいました。そこで,その反省をふまえて今年度は5ヵ月で設定しました。
「マイコン制御」でマイコンのハードウェアやアセンブラについて基礎を行いましたので,ロボット製作は実質4ヵ月間でした。
「マイコン制御」の受講者や相当の知識を有する方を対象に6月から月48時間で開始しました。
しかし,この時間設定では完成できませんので,セミナー時間外も出てきていただきました。
4.全日本相撲ロボット大会九州予選に向けて
4.1 予選までの日程
九州地区予選に向けて表1のようなスケジュールをたて進行しました。
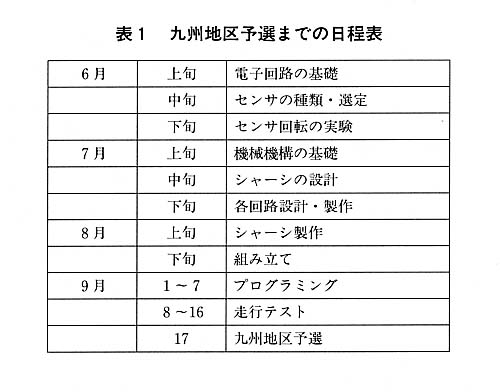
受講生は6名だったのですが,知識や経験,年齢,通所時間等を考慮に入れて1グループ1名,2名,3名という3グループで行うこととし,計3台のロボットを製作しました。したがって,基礎や実験,設計は各グループ全員で行いましたが,製作は「回路部門」「シャーシ部門」に作業分担して効率化を図りました。
4.2 セミナー実施における問題点
前述しましたように,月48時間ではとうてい完成は望めません。もし,完成できる時間設定をしたら相当な時間になり,受講される方が敬遠すると思いましたので,このような時間設定にしました。それで,セミナー開始時に,実際にはこの時間だけではまだ不足していて,できるだけ土日や時間外にもでてこないと終わらない(強制はできない)旨を理解していただきました。完成させることをしっかり約束しておかないといけないと思います。
しかし,表1のように計画はしてみたものの製作段階に入ると時間の配分というものが難しくなりました。
今年は,まず電子回路の基礎をしっかりマスターしてもらい,そのうえでセンサ回路の実験をして,回路動作を把握するようにしました。
基板はエッチングで行いますので,アートワークを PCB CAD を使用し,グループごとにそれぞれ作成してもらいました。普段されたことのない方ばかりだったので,時間はかかりましたが,それだけに回路は十分理解してもらえたと思います。回路デバッグも各自やっていただいたので職員の負担は昨年よりは軽くなったのですが,回路をトレースするのが大変でした。
超音波センサ回路については実際に作っていただいたのですが,時間の関係上それ以外の回路はこちらで提示したものを使用していただきました。その結果,自分たちで作った回路とそうでないものとでは理解度がまったく違っていました。
通常のセミナーは,こちらですべて前もって準備してそれを受講者が実習するという形です。しかし,今回実施したようなセミナーは,今までの経験で基本的なものを用意し,後は必要に応じて準備していくという形になります。また,前年と同じものを作っても仕方がないということもあり,どうしても作りながら施行錯誤を繰り返すというのが現状です。
そういう中で,「せっかく作るからには強いロボットを作りたい」という欲求が芽を出してきたため,「メカトロニクスセミナー」というより「相撲ロボット製作セミナー」という色が濃くなってしまいました。今後は,このセミナーはあくまでも相撲ロボットを題材としたメカトロニクスの学習であるということに重点を置いていかなければならないと思います。
7月半ばくらいにも,受講申し込みがあったのですが,すでにそのときグループ分けもすみ,設計が一段落していたときでしたので,お断りしました。これは,物を製作するセミナーなので仕方ないことと考えますが,コースを分けて設定している以上,できるだけ途中からでも受講できるように来年度以降は対策を考えていかなければいけないと思います。
5.今回製作したロボットの特徴
5.1 受講生の製作したロボット
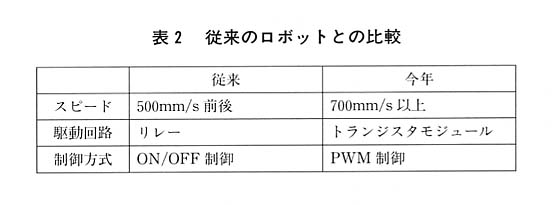
従来の宮崎部屋のロボットは,表2にあるようにリレーで制御を行っていました。そのため500mm/s以上にすると制御できませんでした。しかし,これまでの傾向と時代の流れをみると,スピードがないと勝てません。いろいろと検討した結果,PWM制御を用いて速度制御をしました。しかし,トランジスタモジュールを使用しましたので,あまり電流が多くとれず,パワーの小さいモータを選択するしかありませんでした。しかも,機械加工を少なくするためにギアドモータを使用しました。これは寸法の制限などからも仕方がありませんでした。来年はモータの選定からやり直すつもりです。
センサは,土俵の縁を検知する光センサと相手を検知する超音波センサを使用しました。超音波センサは数で勝負ということで最大8つ搭載し,全方向カバーできるようにしました。
CPUはZ80を使用したので,ソフトウェアは,「マイコン制御」で学習したアセンブラでよかったのですが,デバッグのしやすさと勉強のためC言語で組みました。
今回製作した3台のロボットはそれぞれ特徴があります。そのロボットを写真2に示します。
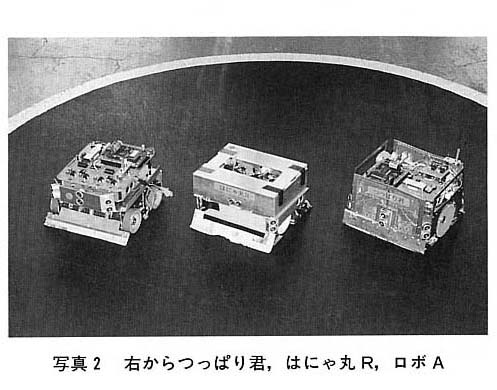
はにゃ丸Rは,前後どちらにも動けるタイプで,左右の車軸をずらしています。当然曲がりやすい方向と曲がりにくい方向が出てきますが,その特徴を生かし,仕切りのときに曲がりやすい方向に動けるような置き方をしておくと,相手の後ろに素早く回り込むことができるという利点があります。
つっぱり君も,前後がないタイプで,宮崎部屋最速のロボットです。約1m/sですが,通常このスピードだと停止できないので,最初は速度を落として,相手を見つけしだいトップスピードになるようにしました。
ロボAは,前後があるタイプで,モータを4つ搭載した4輪独立駆動タイプです。アルミ板にモータを直接つけたので,タイヤの接地がうまくいかず,一輪が浮いてしまい,せっかくの特徴を生かしきっていなかったように思われます。
5.2 3次元CAD/CAMによる相撲ロボットのシャーシ製作
今まで製作したロボットは主にアルミ板を加工して使用していましたが,これをCAD/CAMシステムを利用してできないものかと考え,ロボットのシャーシ製作を行いました。
次にあげるようなことを基本コンセプトに設計を行いました。
- ① CAD/CAMシステムの利点を生かし,なるべくモノコックに近い形にする。
- ② 軽量化を図る。
- ③ すべてをプログラムで製作する。
相撲ロボットのように,複雑な形状の設計は初めてなうえに,CAMM3はあくまでも簡易3次元加工機なので加工範囲や工具の種類,長さも限定されているので,それらも考慮しながら設計をしていかなければいけませんでした。その結果,モノコックというのは現実的には不可能で結局,ギアボックス,ボディー左,右,回路収納ボックス,タイヤ左,右,その他と,9点の部品に分けて設計を行うことにしました。時間の関係で,完全に設計を行ってから加工というのではなく,加工をしながら次の設計をしていくという自転車操業になってしまいました。期間的には約1ヵ月程度かかりました。その製作されたシャーシを写真4に示します。

6.九州大会の結果と感想
これまで報告したように体系立ててセミナーを行ったのですが,結局,九州地区予選前日はほとんど徹夜に近い状態でした。テスト走行がほとんどできず,予選のときにうまく動くか不安でした。
九州地区予選の結果は,
- ・はにゃ丸R……ブロックベスト4
- ・つっぱり君……3回戦進出
- ・ロボA…………2回戦進出
でした。
とにかく初戦敗退しなくてよかったというのが本音で,上記結果は上出来だと思います。ただ,負けた相手がすべて吸引型(中の空気を吸い込み吸着することでダウンフォースを発生させるタイプ)で,しかもそれらがベスト3の上位を独占しましたので,来年は「打倒吸引型!!」と車の中で意気揚々とするメンバーでした。
セミナー終了後,反省会をしたとき,受講者の方々が「ロボットを作ってみて勉強になったし,作っていたときが一番充実していた」と言ってくださり,苦労が報われました。それとトランジスタ破損やハンダ不良など起こるべきトラブルが起こり,こちらの方もトラブルシューティングの勉強になりました。
7.今後の展望
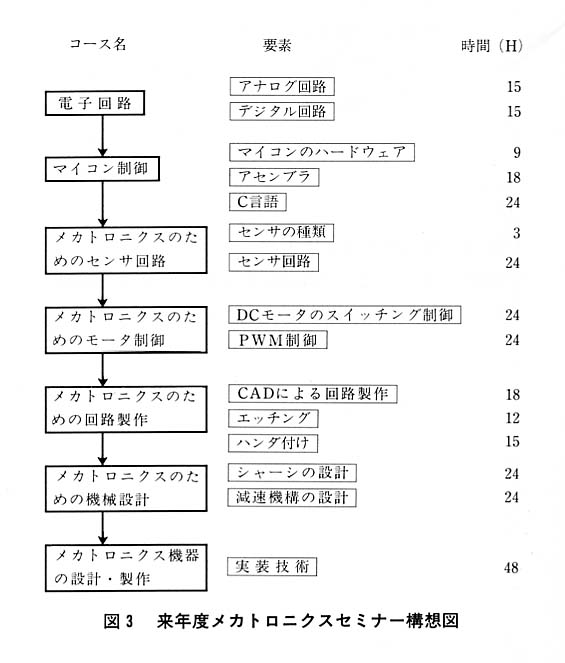
セミナーを4ヵ月連続で実施しましたが,すべての要素をまかなえなかったと思います。特に,機械加工とプログラミング,ハンダ付けの部分が不足していましたので,来年はこの要素を十分取り入れていきたいと思います。また,途中から受講する方も入れるようできるだけ細かくコースを設定しなければと考えています。図3に来年度のセミナーの構想図を示します。
今年までの受講者は個人が多く,趣味的要素が強かったので,来年は団体にうまく活用してもらい,一歩進んだセミナーにしていきたいと思います。
8.おわりに
このようにセミナーとしてやっていけるのは施設全体の協力が必要だと思います。教室や時間などいろいろなことを含めて,ポリテクセンター宮崎の職員全員に協力していただきました。この場をお借りしてお礼を申し上げます。